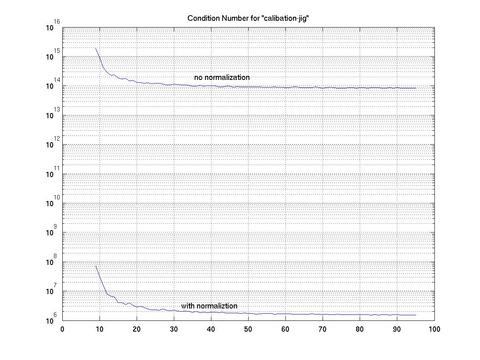
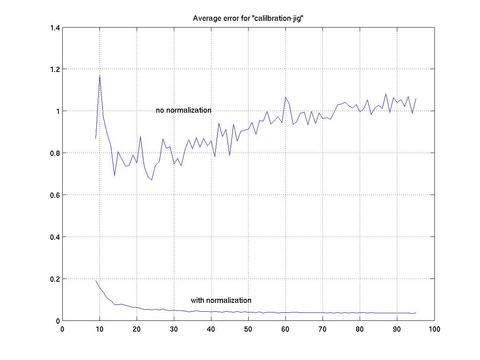
- For the "calibation_jig"
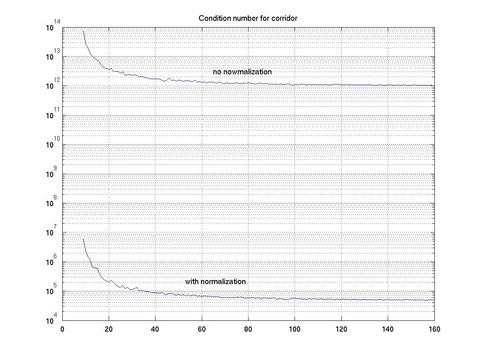
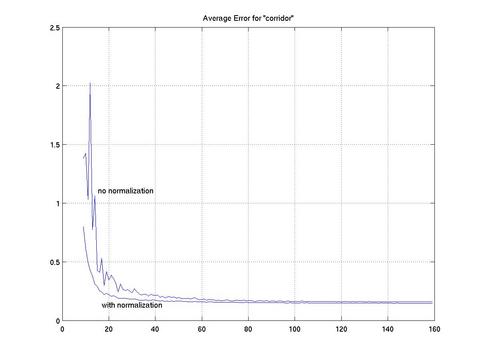
- For the "corridor"
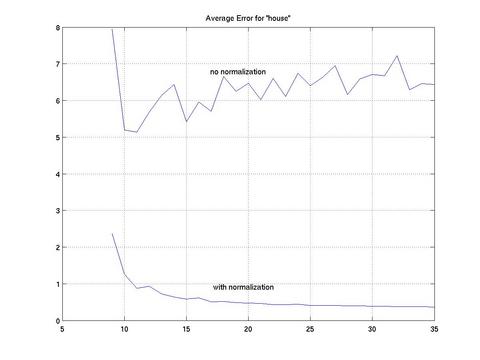
2. Average Errors (corresponding to Hartley's fig. 8)
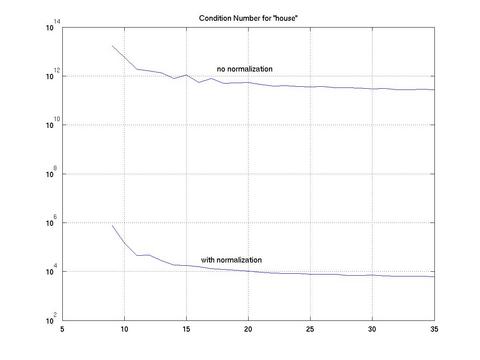
- For the "house"
- For the "calibration_jig"
- For the "corridor"
3. Epipolars
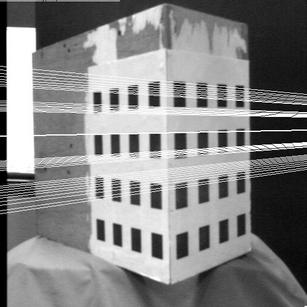
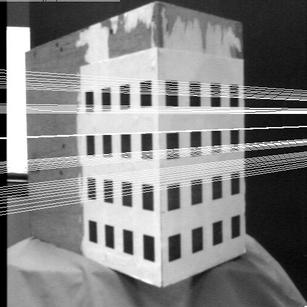
- For the "house"
- left image: 173.154 -8064.71
- right image: 74.7648, -3601.55
- For the "calibration_jig"
- left image: 1041.2 206.131
- right image: 1035.56 206.44
- For the "corridor"
- left image: 256.427 184.601
- right image: 255.68 183.693
4. Epipolar lines (that overlay the images)
4.1 For the "house"
- left image:

- right image:

4.2. For the "calibration_jig"
- left image
- right image
4.3. For the "corridor"
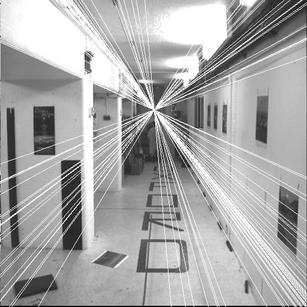
- left image:

- right image